

O coordenador do Núcleo de Tecnologia Assistiva (NTA) da Ufes, professor Teodiano Bastos Filho, recebeu o Prêmio Mercosul de Ciência e Tecnologia 2021/2022, pelo desenvolvimento de uma cadeira de rodas robótica para pessoas com deficiência motora severa. O Prêmio, que nessa edição teve como tema Tecnologia Assistiva, é promovido pelo Ministério da Ciência, Tecnologia e Inovações (MCTI) e tem como objetivo reconhecer e premiar trabalhos de estudantes e pesquisadores que representem potencial contribuição para o desenvolvimento dos países membros e associados ao bloco econômico Mercosul.
A pesquisa premiada é desenvolvida há mais de 20 anos, promovendo a inclusão de pessoas com movimentos limitados e sem movimentos em todos os espaços possíveis. “A gente trabalha para tornar essas pessoas visíveis, para que elas sejam incluídas na sociedade e que tenham acesso a todos os direitos de um cidadão”, afirma Bastos Filho.
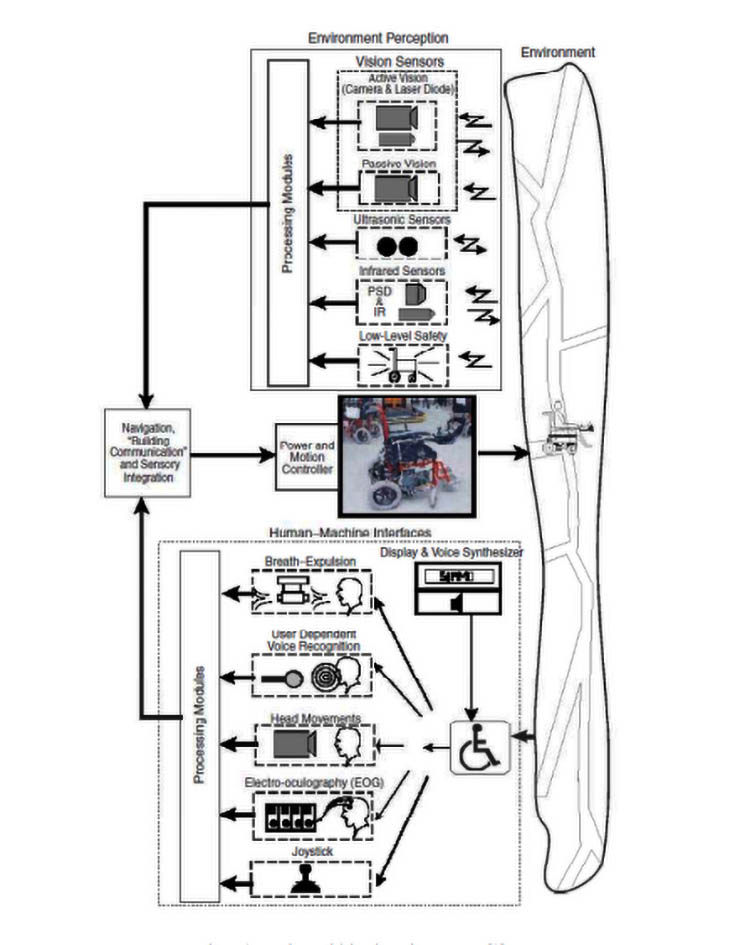
A cadeira de rodas robótica integra modalidades de locomoção e comunicação por meio de piscada de olhos, movimentos do globo ocular, movimentos de cabeça, sopro e sucção, ou sinais cerebrais. O equipamento tem, ainda, a capacidade da cadeira de interagir com o ambiente, ligando e desligando aparelhos da residência por meio de uma conexão sem fios.
Sensores
Modelos anteriores da cadeira funcionavam com o uso de joystick, no entanto, na versão mais recente, ela é controlada por um sistema composto de eletrodos. Estes são sensores que aderem à pele para capturar o sinal elétrico dos movimentos, ou intenções de movimentos direcionadas ao cérebro por meio do sistema nervoso. Dessa forma, os eletrodos transformam a informação biológica do corpo humano em um sinal elétrico.
“Todos os recursos desse dispositivo são fruto da cooperação de muitos estudantes e pesquisadores do NTA: um pesquisador elaborou uma interface baseada no piscar de olhos, outro fez uma interface baseada no movimento do globo ocular, outro se dedicou aos sinais cerebrais ou ao controlador. Então, muitas pessoas contribuíram para os resultados alcançados”, detalha o professor.
A cadeira de rodas robótica também pode navegar de forma autônoma, pois tem embutida a tecnologia robótica de localização e mapeamento simultâneos (SLAM, sigla em inglês), podendo se mover e identificar o local ao mesmo tempo. Há, ainda, a possibilidade de usar a cadeira em trilhas metálicas, que possibilitam a locomoção autoguiada. O funcionamento das modalidades foi testado e aprovado por pessoas com deficiência voluntárias.
Tese de Mestrado foi apresentada em 2011
Sob o título “Robotização de uma cadeira de rodas”, o então mestrando Patrick Noé dos Santos Filgueira, apresentou essa dissertação ao Programa de Pós[1]Graduação em Engenharia Elétrica do Centro Tecnológico da Universidade Federal do Espírito Santo, como requisito parcial para obtenção do Grau de Mestre em Engenharia Elétrica, na área de Automação e que foi aprovada em 29 de Setembro de 2011. A íntegra da tese de mestrado pode ser lida através de download ao clicar neste link.
Logo no início do documento o então estudante fez o seguinte agradecimento ao mestre: “Ao meu orientador Prof. Dr. Teodiano Freire Bastos Filho… Agradeço pelo seu apoio desde o início desta jornada, o que me proporcionou muito mais que orientação para este trabalho, mas sim, um grande exemplo de autenticidade, valores éticos e amor ao estudo, que serviram de espelho para minha própria construção intelectual. E também pela fantástica oportunidade de desenvolver este trabalho e entrar em contato com esta área de pesquisa.
No resumo, Patrick Filgueira faz o seguinte resumo: “Neste trabalho foi desenvolvido um sistema de controle de baixo nível para uma cadeira de rodas robotizada controlada por sinais biológicos, incluindo hardware (Placa de Acionamento dos motores) e software (firmware executado em microcontrolador). O objetivo é dar suporte para um sistema de controle de alto nível que captura, processa e interpreta sinais biológicos a fim de controlar uma cadeira de rodas robótica”.
“Neste trabalho foi dado um especial foco à eletrônica, ao sistema operacional de tempo real aplicado a cadeira de rodas robótica e ao controlador de baixo nível também aplicado a esta. A eletrônica de controle da cadeira de rodas utilizou uma rede de comunicação industrial, a rede CAN, para suportar toda a aplicação e algoritmos de controle. Todas as tarefas implementadas são geridas por um sistema operacional de tempo real. O controlador de baixo nível implementado é capaz de controlar de forma independente as velocidades angular e linear da cadeira de rodas”, prosseguiu.
“Para alcançar o objetivo proposto neste trabalho fez-se necessário manipular dispositivos de eletrônica de potência, programação, algoritmos de controle e instrumentação, rede CAN, sistema de tempo real, armazenamento de dados e controle automático. Palavras-chave: Cadeira de Rodas Robotizada, controlador de baixo nível, rede CAN, sistema de tempo real, supervisório, ponte H, PWM e sinais biológicos”, concluiu.