
Pesquisadores do Laboratório de Telecomunicações (LabTel) e do Human Centered Systems Laboratory (Laboratório de Sistemas Centrados no Ser Humano – HCS), ambos vinculados ao Programa de Pós-Graduação em Engenharia Elétrica da Ufes (PPGEE/Ufes), desenvolveram um robô para explorar e mapear ambientes. Batizado de HCS A1, o robô possui tecnologia capaz de auxiliar resgates e facilitar a gestão de espaço de empresas.
A ideia dos pesquisadores é que o robô construa mapas com alto grau de realidade, proporcionando ao usuário a possibilidade de ter a sensação de telepresença. Essa visualização de ambientes a distância, de forma imersiva e virtual, ocorre ainda com a ajuda de um controle que permite ao usuário sentir, por meio do tato, a interação com o espaço. Ao estar diante de um obstáculo, por exemplo, os sensores detectam essa informação e impedem o controlador de direcionar o robô para a frente. Nesse contexto, a pessoa sentirá resistência ao manuseá-lo e redirecionará o trajeto.
“Esse projeto provém de uma colaboração do laboratório HCS com o Instituto de Inteligência Computacional Aplicada (I2CA). Procuramos desenvolver robôs móveis e estratégias de controle e interação para a utilização em diferentes contextos. Conseguir mapear ambientes com essa característica de tridimensionalidade, em 3D, nos permite várias aplicações e maior imersão de quem operada o robô. É um avanço que dificilmente seria alcançado com tecnologias que constroem mapas planos, em 2D”, detalha o professor do PPGEE da Ufes Anselmo Frizera, orientador da pesquisa.
Utilizações
As habilidades do HCS A1 possibilitam a sua utilização em diferentes áreas. Na área de segurança, o robô pode ser usado em regiões de desastres, ajudando, por exemplo, o Corpo de Bombeiros. Em um cenário de altas temperaturas, como um incêndio, é possível utilizar robôs desse tipo para mapear o espaço, identificar a localização das vítimas e, aí sim, iniciar o resgate.
Em espaços industriais, pode-se realizar inspeções para localizar equipamentos e identificar situações irregulares. É possível monitorar o espaço, controlando estoques e detectando a presença de pessoas em áreas classificadas como restritas ou de risco à vida.
Tecnologia
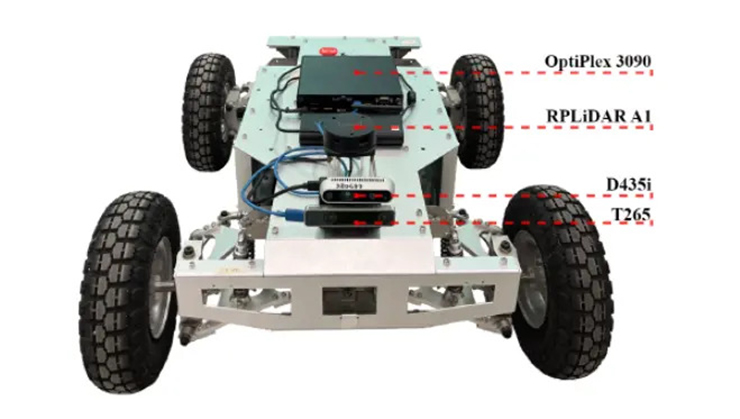
O robô possui um conjunto de câmeras que fazem estimativa de posição do robô e ao mesmo tempo mapeiam o ambiente. Além disso, para possibilitar a navegação autônoma, há a aplicação de um sensor que coleta informações para identificar obstáculos em volta de todo o robô, ajudando na navegação.
“A integração do conjunto de sensores permite que o robô visualize o mundo em três dimensões, proporcionando ao operador uma noção de profundidade além de um feedback háptico [no tato], resultando em uma sensação de realismo durante a teleoperação. Além disso, essas informações podem ser utilizadas para a detecção de objetos, possibilitando diversas aplicações e aumentando a autonomia do robô”, explica o estudante de mestrado da Ufes Igor Vieira, autor do estudo.
A pesquisa recebe apoio da Fundação de Apoio à Pesquisa do Espírito Santo (Fapes) e do Conselho Nacional de Desenvolvimento Científico e Tecnológico (CNPq), além de contar com a parceria do Instituto de Inteligência Computacional Aplicada (I2CA).
Texto: Ghenis Carlos Silva (bolsista)